-

- いいね!0
 麦茶の逸般人工作室
@darkmatter159
麦茶の逸般人工作室
@darkmatter159
電ドリにしては精度良い方かな パイプ加工苦手にしてはよくやったw pic.twitter.com/SBrRk3uG7X
2016-04-02 17:03:59 拡大
拡大





 麦茶の逸般人工作室
@darkmatter159
麦茶の逸般人工作室
@darkmatter159
とりあえず回路と線の準備できたー 後はマシンとプログラムだーーーー pic.twitter.com/xd3zThW7VJ
2017-04-03 22:01:54 拡大
麦茶の逸般人工作室
@darkmatter159
拡大
麦茶の逸般人工作室
@darkmatter159
リポチェッカー的なやつできた\(^-^)/ バッテリー残量は12.6Vを100%、9.9Vを0%として計算 電圧に関してはほぼ正確だけど残量は目安だから、あったらいいかなー程度 pic.twitter.com/uWEWlrkpP8
2017-04-04 07:09:10
麦茶の逸般人工作室
@darkmatter159
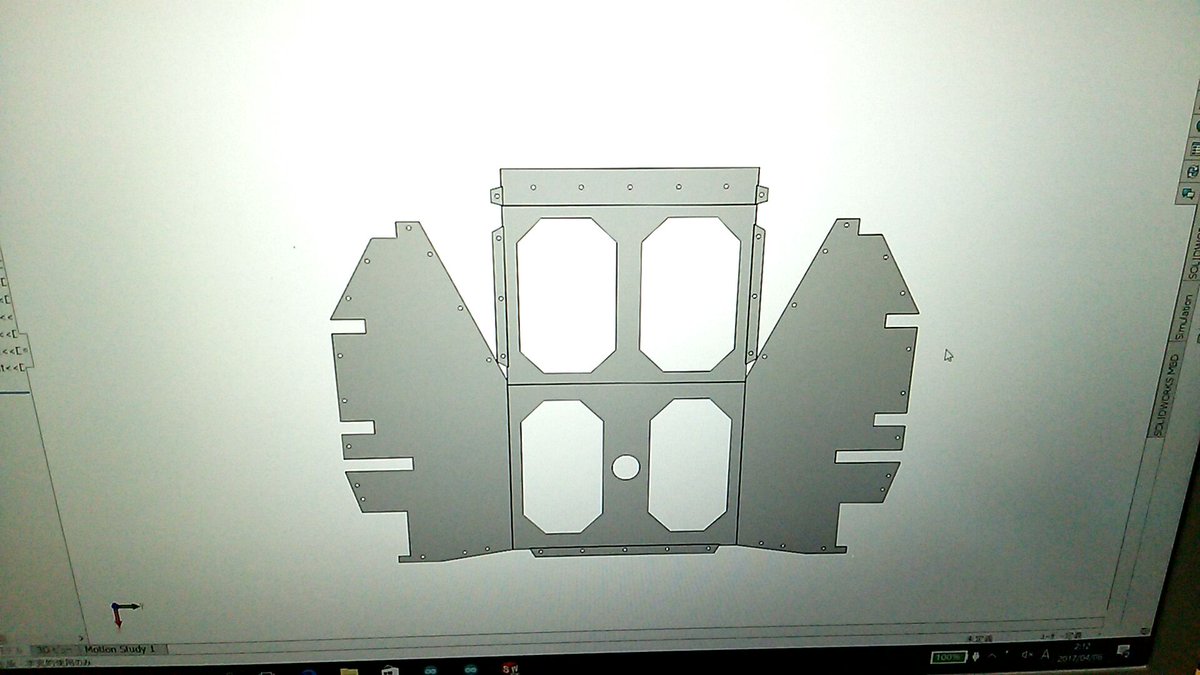
設計ほぼ終わったー 後は超めんどくさい板パーツを切って曲げるだけだー pic.twitter.com/4lWkTFZZgx
2017-04-05 21:35:44 拡大
拡大
 拡大
拡大
 麦茶の逸般人工作室
@darkmatter159
麦茶の逸般人工作室
@darkmatter159
サーボのとこいい感じにまとまったー とりあえず今回使うサーボは2つだけど、後から増えるかも知れないからこれでいいよね( ̄▽ ̄ ) pic.twitter.com/dRare2CUo0
2017-04-07 05:20:45 拡大
拡大
 拡大
拡大


 麦茶の逸般人工作室
@darkmatter159
麦茶の逸般人工作室
@darkmatter159
板金終わったーー!! めっちゃいい感じ!! 思ってたより強度ある(*^^*) 6時からやって気付いたらこんな時間にw pic.twitter.com/l8j4LnXEMC
2017-04-09 03:09:29 拡大
拡大
 拡大
拡大




 がりょ!
@surpace0924
がりょ!
@surpace0924
この論文のアウトラインは理解した とりあえずここにかかれている制御形式は今までチームでしてきた方法とまるっきり違う まず移動方向の偏角と動径の算出が不要で、極座標の概念が必要なくすべて直交座標系内でモータ出力の演算が可能
2017-04-10 21:42:10
がりょ!
@surpace0924
すなわち、全く三角関数を用いずにメカナムの全方向移動制御が可能。 でもこれをどうプログラムに組み込むかが課題 行列は2次元配列を使えばいいけど チーム内で使用していたモータの回転方向とこの論文内で定義されているモータの回転方向が逆という...
2017-04-10 21:49:32
麦茶の逸般人工作室
@darkmatter159
射的って俺が今作ってるこいつに射出機構付ければ出れるんじゃね? #交ロボ pic.twitter.com/GVn5kbyTyi
2017-04-17 11:57:44 拡大
麦茶の逸般人工作室
@darkmatter159
拡大
麦茶の逸般人工作室
@darkmatter159
パソコンいじってて飽きた時に過去に作った自分のCADデータ見ると楽しいw 特に歯車系が楽しい(*´∀`) pic.twitter.com/3To7LEd1fs
2017-04-17 23:58:16
麦茶の逸般人工作室
@darkmatter159
サーボとDCモーターの制御できたーー あとは今日の部活で戦車に付けてサーボのリミット調整すれば終わりだー\(^-^)/ pic.twitter.com/9PHt1TIlJj
2017-04-18 04:02:49
麦茶の逸般人工作室
@darkmatter159
完成!! 機械班が全て1人でやったわりには良くできたと思う\(^-^)/ とりあえず名前良いの思い付かないから"麦タンク"でいいやー pic.twitter.com/oqR1bxfXM1
2017-04-18 20:07:21
麦茶の逸般人工作室
@darkmatter159
@yossan_2nd プラ段いいですよ\(^-^)/ あとアルミの板金もなかなかいいですよ pic.twitter.com/MtBSAnBh5i
2017-04-19 18:49:18 拡大
拡大