-
 timekagura
timekagura
- 907
- 0
- 0
- 0
-

- いいね!0
timekagura
@timekagura
電磁現象世界の天動説では 光行差のこと無視し 光線は、あちこちから 自分位置に 常に光速C で、 やって来ると仮定し 作業仮説 組み立てる。
2019-05-08 17:07:09
timekagura
@timekagura
最初は 線路慣性系での 天動説。 小高い丘から線路レールを眺める。 3次元のy軸高さ 考えるの面倒なので、 小高い丘としたけど、 線路レールと 観察者の立ち位置高さは 同じとし xz平面で考える。 pic.twitter.com/GlSzouUUlO
2019-05-08 17:08:44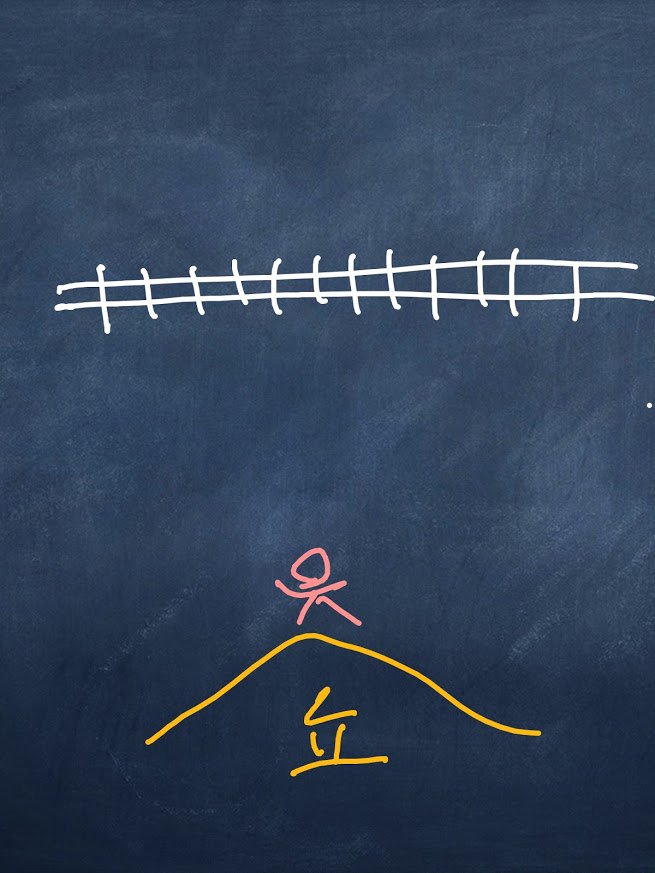 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
左側に見える G位置までの距離が √2 右側に見える D位置までの距離が √2 丘のヒト型存在から離れてる。 光線は 光速Cで 観察者にやって来るとしたから いま見えた映像イメージは √2秒前の G位置と D位置の姿である。 pic.twitter.com/fuujOJ2HGH
2019-05-08 17:15:21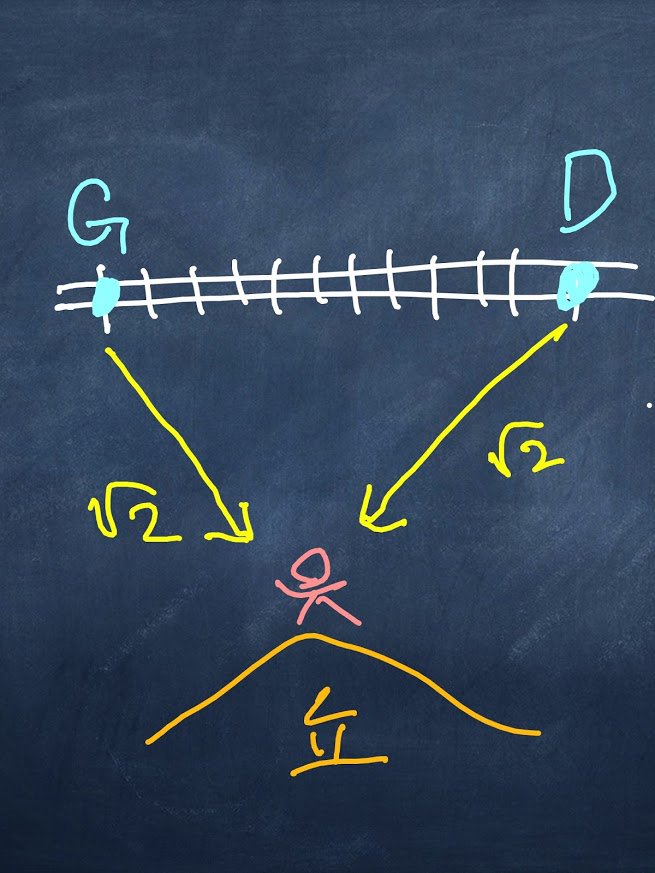 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
G位置の 「時刻t=0映像風景」が ヒト観測器 E位置で 時刻t=√2に見える。 ワゴン車(点位置存在)が t=0にG位置に存在したかどうか。 数学者の超越性を持たないのが 観察者であり、観測機器。 だから G位置と同時刻の 丘E位置では、 G位置状態が シュレディンガーの猫 入れた箱。 pic.twitter.com/8UlemSYNso
2019-05-08 23:38:38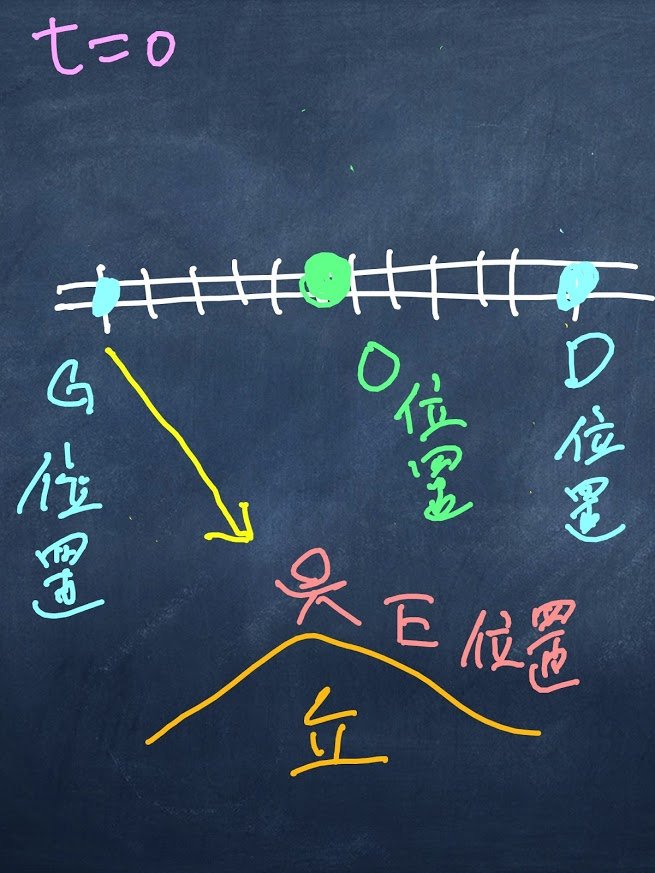 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
存在としてのワゴン車は、 √2秒間分、 右に進んでいる。 ヒト観測器 位置:丘 時刻t=√2 G位置のワゴン車イメージ と G位置に埋め込まれた時計時刻t=0 見えたときに、 ワゴン車の存在位置は パープル色のとこ。 ただし、丘時刻 t=√2からは ワゴン車はG位置に見えてる。 pic.twitter.com/qDbdJ1FiGl
2019-05-08 23:29:29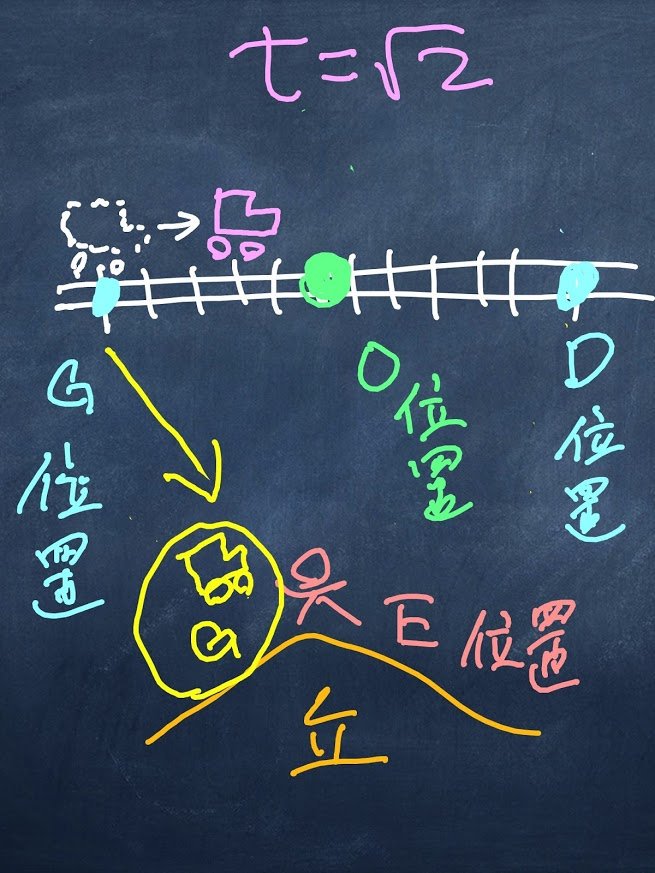 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
丘の上の観察者を頂点とした 直角2等辺三角形の底辺、中間地点を原点O。 丘の上からの距離が1単位。 だから1秒前のイメージが 観察者に見える。 pic.twitter.com/j6dg4IZ6IN
2019-05-08 17:22:56 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
ワゴン車が グリーン座標原点О位置に着いた。 時刻t=2 どうやらワゴン車は 線路レール1単位を 2秒で進んだから 光速の半分の速度。 pic.twitter.com/TOfk9C9Bh6
2019-05-08 17:36:38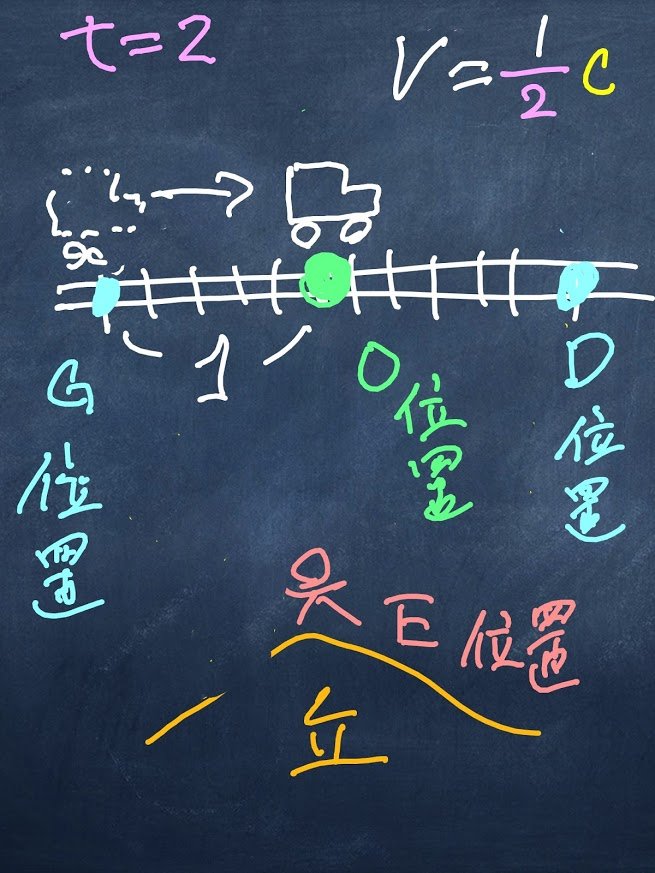 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
グリーン原点位置Oに 現場時刻t=2に到着したワゴン車映像が 観察者時刻 t=3に 映像イメージが到着した。 線路レールと 丘の観察者は、同じ慣性系。 pic.twitter.com/8NNCjd7AjJ
2019-05-08 17:39:47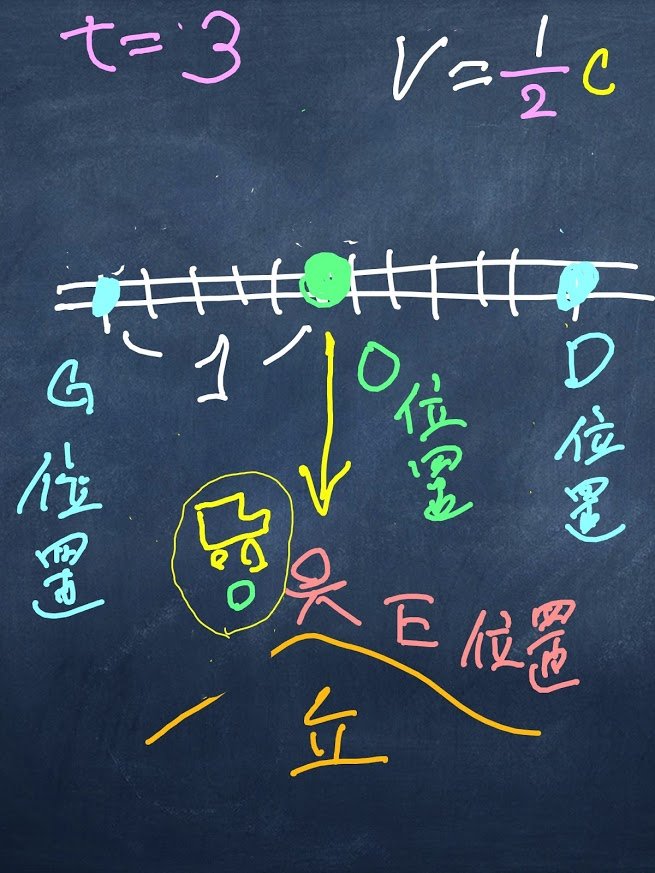 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
存在としてのワゴン車は t=0に G位置。 t=√2に G位置から右に√2の半分、0.7のとこ。 t=2に 観察者の正面、原点O位置。
2019-05-08 17:46:45
timekagura
@timekagura
観察者が視認したワゴン車映像イメージは t=√2に G位置を出発するワゴン車イメージ。 t=3に O位置に到達したワゴン車イメージ。
2019-05-08 17:48:57
timekagura
@timekagura
存在としてのワゴン車は 2秒間に1単位区間、進んだので 速度は 光速の半分。 だけど観察者からの 見かけ速度だと、 t=√2から t=3までの観察時間で、 線路区間1を進んだように見えるから 3-1.4=約1.6秒で G地点から正面原点O地点に進んだように 見える。
2019-05-08 17:52:55
timekagura
@timekagura
存在としてのワゴン車は 光速の半分、0.5速度なのに、 見かけワゴン車の速度は 0.6速度ぐらいになる。 ガリレオ先輩の扱った 「見かけ速度」は、数学幾何座標上のもの。 ここでは、現場事象が 電磁波で情報として 近接作用で知覚される 。。。 「電磁現象世界の見かけ速度」 pic.twitter.com/1Rlsoa6Ssj
2019-05-08 17:58:44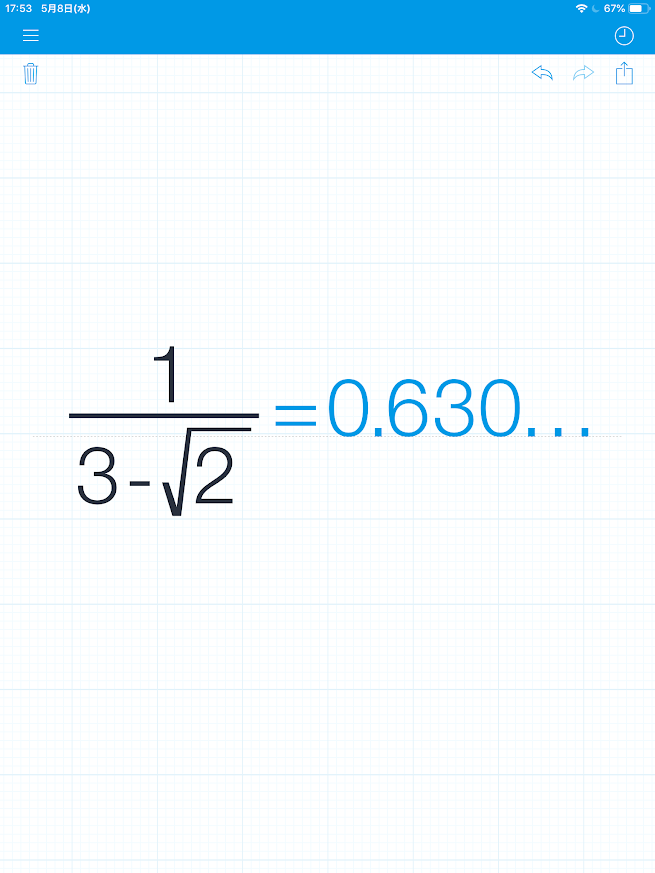 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
さあ今度は 列車慣性系で 全長2単位の客車側面から飛び出した 直角三角形頂点位置から、 線路レールを走ってる客車側面 観察するヒト型カメラアイに 世界は どうみえるか。探っていこう。 pic.twitter.com/cByG3S1dqT
2019-05-08 18:07:20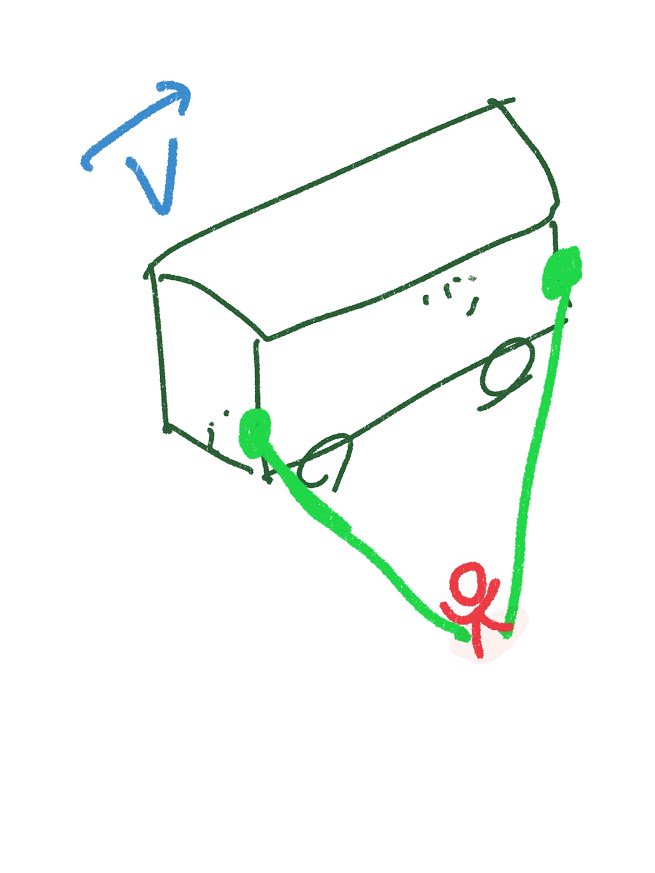 拡大
timekagura
@timekagura
拡大
timekagura
@timekagura
丘の上から 視野正面前方を 真っ直ぐ横切る線路レールや道路。 そこを等速直線運動する ワゴン車や、屋形船を カメラフレーム中心に収める。 同じ位置に立ったまま。 視線が 「立ち位置中心」に 回転する。
2019-05-08 23:52:46 𡈽方 雅之@プロセス思考
@hijk0909
𡈽方 雅之@プロセス思考
@hijk0909
私たちが「意識のスクリーン」と呼ぶ現象面は、物理からも自我からも、果てしなく遠く離れた所に灯っている。スクリーンに何が写っていようがそれは「決して」私ではない(私はスクリーンを見ている側だ)。また、物理情報がスクリーンに到着するまでには多段の加工を経ていて、全く別物になっている。
2019-05-07 14:03:51
𡈽方 雅之@プロセス思考
@hijk0909
開成→東大(副業で ENIXのゲームプログラマー(ドラクエ5 AI 等)) → NEC(SE・プロマネ・全社業革リーダ) → 50歳で脱サラ起業、現在 (株)カレントカラー代表取締役、『プロセス思考』伝道師。リンク先で業務改善・事業改革・組織変革のお役立ち情報を無料公開中。 ゲーム・アニメ・音楽・科学・哲学が好き♪
twilog
https://twilog.org/zionadchat/
http://zionadchatwitter.seesaa.net/
写真解説資料 ZIONADCHAT
https://photoschat39.blogspot.com/
草稿 Dürer & 測距儀 勝負5 光行差 無視して 天動説 開始
https://timekagura.hatenablog.com/entry/2019/05/08/170613
目次リンク
http://timekagura.blogspot.jp/2018/04/timekagurablogger.html
Dürer & 測距儀 勝負6 路面電車からの速度測定
Dürer & 測距儀 勝負5 光行差 無視して 天動説 開始
https://togetter.com/li/1353135
1092 pv